In dit artikel wordt gekeken naar de mogelijkheid om twee meetsystemen te combineren in één monitoringssysteem, te weten de combinatie van inductielussen met Floating Car Data (FCD). Dit voorbeeld komt uit de bijdrage van Van Lint aan de PAO Cursus Regionale Verkeersmonitoring van november 2006.
Er zijn verschillende combinaties van meetsystemen te bedenken. Uit de bijdrage van Van Lint blijkt dat een combinatie van Floating Car Data met inductielussen tot de beste resultaten leidt. Het beste resultaat op een traject van drie kilometer wordt behaald bij drie inductielussen in combinatie met twee procent FCD. Dit is dertig procent goedkoper dan het plaatsen van zeven lussen op het traject. Het is tevens nauwkeuriger en betrouwbaarder.
Het probleem[]
Onderstaande figuur is een schematische weergave van tweestrooks snelweg AB (lengte drie kilometer), met halverwege een invoegstrook. De verkeersmanager heeft als opdracht weg AB uit te rusten met een monitoringssysteem, dat over de gehele weg zo nauwkeurig mogelijk de snelheden meet, dat bovendien betrouwbaar is én robuust tegen mogelijke tijdelijke communicatie- of elektriciteitsstoringen.

{kind=link}
Bron: Van Lint
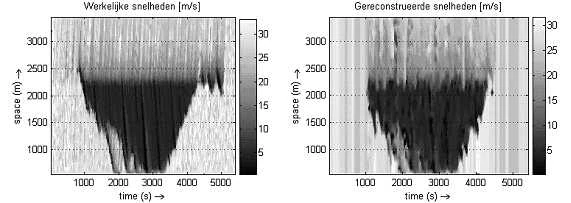
Laten we eerst eens kijken wat zich op AB afspeelt en welke verkeerscondities er kunnen worden gereconstrueerd. Als de verkeersvraag op de weg en bij de invoeging toeneemt, onstaat op een gegeven moment file bij de invoegstrook (vraag > capaciteit na de invoeging). In onderstaande figuur (links) is een x-t diagram met daarin een zogenoemde contourplot van snelheden weergegeven. De figuur geeft aan waar de congestie ontstaat en hoe deze zich ontwikkelt. De donkere kleuren geven de lage snelheden weer, de lichtere kleuren een vrije afwikkeling.
{kind=link}
Bron: Van Lint
De vraag is: wat voor soort monitoringssysteem kan deze condities (file op- en afbouw) zo nauwkeurig en betrouwbaar mogelijk reconstrueren?
De verschillende alternatieven[]
De verkeersmanager vraagt zich af op welke plekken hij op de weg inductielussen moet plaatsen, die elke minuut de gemiddelde snelheid en intensiteit meten (op de locaties 1-7 in de eerste figuur). Of moet ingaan op de offerte van een bedrijf dat floating car data (FCD)-systemen verkoopt. In dit systeem is elk voertuig uitgerust met een in-car apparaat, dat elke vijftien seconden zijn positie en snelheid naar een centraal systeem communiceert. De centrale maakt deze gegevens vervolgens weer beschikbaar voor de wegbeheerder. De verkoper van het systeem verzekert de verkeersmanager dat hij – mits de prijs goed is – een dekkingsgraad van X-procent uitgeruste voertuigen op AB kan garanderen. In alle gevallen is er een inductielus op de invoegstrook geplaatst, omdat hierop een toeritdoseerinstallatie(TDI) wordt aangelegd.
In dit voorbeeld worden enkele scenario’s uitgerekend, waarbij de keuze moet worden gemaakt uit een willekeurige combinatie van de onderstaande mogelijkheden:
- 0 tot 7 inductielussen. We beperken ons tot de keuze uit 1 lus (stroomopwaarts op locatie 7 uit de eerste figuur), 3 lussen (op locaties 7,4 en 1) en 7 lussen (op alle locaties);
- X-procent uitgeruste voertuigen (1 procent is equivalent met ongeveer 60 voertuigen). We beperken ons hier tot 0, 2, 4, 6, 8 en 10 procent uitgeruste voertuigen.
Om uit de mogelijke metingen een netwerkbreed (in dit geval het gehele stuk AB) beeld te krijgen van de snelheden, wordt een eenvoudig verkeersafwikkelingmodel gebruikt om de beschikbare metingen uit sensoren te integreren en zo nodig te fuseren. De gebruikte techniek daarbij is het extended kalman filter (EKF), een techniek die in veel real-time verkeerstoepassingen wordt gebruikt.
Kosten, baten en experimentele setup[]
Een monitoringsysteem met inductielussen vergt investeringen en onderhoud. We gebruiken hier hypothetische getallen, al liggen die wel in dezelfde ordegrootte als in de huidige praktijk. De jaarlijkse kosten voor afschrijving en onderhoud voor een inductielus bedragen dan ongeveer 10kE per lus en 20 kE vast (centrale ICT infrastructuur). Het FCD-abonnement bedraagt per 1 procent uitgeruste voertuigen circa 2kE/km/jaar. Dat is in dit geval dus 6kE/jaar per procent uitgeruste voertuigen. De ontwerpeisen zijn tweeledig. Enerzijds gaat het om nauwkeurigheid, anderzijds om betrouwbaarheid bij mogelijk falen van inductielussen.
Als maat voor nauwkeurigheid, waarmee het monitoringsysteem op elke sectie langs AB de werkelijke snelheid kan reconstrueren, wordt de zogenaamde wortel uit de gemiddelde kwadratische fout gebruikt (de Root Mean of Squared Error, kortweg RMSE). Dit is een veelgebruikte maat voor de totale gemiddelde fout die een model of systeem maakt.
In onderstaande formule stelt yk de voorspelling of schatting voor en tk de gemeten waarde. Het kwadraat in de formule voor RMSE zorgt ervoor dat negatieve en positieve afwijkingen elkaar niet opheffen. Het wortelteken maakt dat de eenheid van deze fout dezelfde is als de geanalyseerde grootheden yk en tk. In dit geval is dat snelheid [m/s].
Om de betrouwbaarheid (of beter robuustheid) aan te tonen, berekenen we de RMSE voor elke combinatie van monitoringssystemen met oplopende percentages onbetrouwbare lusdetecties (van 0 tot 50 procent). Elke inductielus heeft dezelfde kans om onbetrouwbare metingen te produceren. Hoe minder snel de RMSE toeneemt met percentages onbetrouwbare inductielussen, hoe robuuster en betrouwbaarder het gecombineerde monitoringssysteem is. Als maat voor onbetrouwbaarheid (unreliability - UR) nemen we derhalve de gemiddelde relatieve toename in RMSE per procent extra onbetrouwbaarheid in de lusdata:
Hoe kleiner de UR, hoe betrouwbaarder het systeem. Onderstaande figuur geeft schematisch weer welke combinaties van inductielussen, FCD en onbetrouwbaarheidsgraad van de lusgegevens worden geëvalueerd (in totaal 6x6x3 = 108 combinaties).
{kind=link}
Bron: Van Lint
Evaluatie van de resultaten: kosten versus baten[]

{kind=link}
Bron: Van Lint
De figuur rechts laat de RMSE-resultaten van alle combinaties van monitoring (FCD en inductielussen) zien voor verschillende percentages onbetrouwbare indutcielusgegevens. In alle grafieken geeft de kleur de grootte van de RMSE-fout aan. Hoe donkerder een bepaald vakje, hoe groter de RMSE-fout en dus hoe onnauwkeuriger het monitoringssysteem. Elk vakje stelt een combinatie van lussen, FCD-percentage en het percentage onbetrouwbare gegevens voor.
Uit de figuur kunnen enkele (verwachte) trends worden gehaald:
- De installatie van meer lussen leidt tot een nauwkeuriger monitoringssysteem (vergelijk de 'gemiddelde kleur' tussen de drie grafieken).
- Hetzelfde kan ook worden gezegd van het percentage FCD dat wordt ingekocht. Hoe groter dat percentage, hoe nauwkeuriger de resultaten (zie de lichter wordende 'kleur' in elke grafiek van links naar rechts).
- Ten slotte is duidelijk dat in alle gevallen een groter percentage onbetrouwbare lusdata leidt tot grotere onnauwkeurigheid (de donker wordende 'kleur' in elke grafiek van onder naar boven).
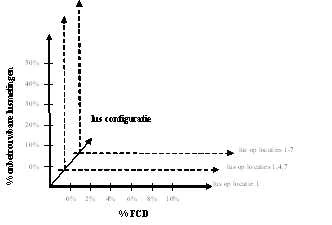
De figuur geeft nog meer informatie. Nemen we in elke grafiek de gemiddelde RMSE over alle percentages onbetrouwbare lusdata (het gemiddelde van elke 'kolom') en berekenen we de onbetrouwbaarheidsindex, zoals in de formule voor UR en de kosten, dan ontstaat onderstaande figuur. In dit figuur staat links de onnauwkeurigheid (in termen van RMSE), in het midden de onbetrouwbaarheid (UR) en rechts staan de kosten. Het percentage FCD in combinatie met verschillende configuraties lussen wordt getoond.

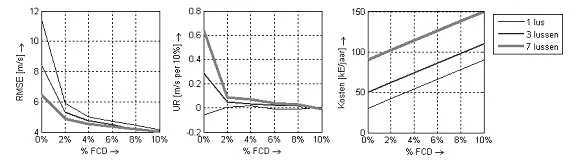
Bron: Van Lint
{kind=link}
Bovenstaande figuur laat ondubbelzinnig zien dat er voor elke inductielusconfiguratie een afnemende meeropbrengst is, zowel wat betreft nauwkeurigheid (links) als betrouwbaarheid (midden) bij het inkopen van meer FCD-gegevens. Tegelijkertijd neemt (op basis van onze aannames voor kosten) de prijs van een nauwkeuriger en betrouwbaarder systeem lineair toe.
Het is dus zeer goed te verdedigen dat de wegbeheerder op basis van de hier gehanteerde aannames en de resultaten kiest voor drie inductielussen (op locaties 1, 4 en 7) en een abonnement op 2 procent FCD. Hij is dan niet alleen 30 procent goedkoper uit dan een systeem met uitsluitend zeven lussen (62 kE versus 90 kE), maar hij heeft ook een systeem dat èn nauwkeuriger (RMSE 5.3 m/s versus 6.4 m/s) èn betrouwbaarder (UR 0.5 m/s per 10 procent versus 6.4 m/s per 10 procent) is.
Kritische discussie over deze casus[]
Deze casus geeft aan dat op basis van een heldere doelstelling (welke informatie is nodig, in dit geval snelheden) en kwantificeerbare performance-eisen (nauwkeurigheid en betrouwbaarheid) een objectieve keuze kan worden gemaakt voor een bepaald type monitoringssysteem of een combinatie van monitoringssystemen. Een randvoorwaarde daarbij is een tool om gegevens uit verschillende systemen te integreren. In het hier besproken voorbeeld is een eenvoudig afwikkelingsmodel gecombineerd met een extended Kalman Filter (EKF).
Om het voorbeeld inzichtelijk te houden, zijn een aantal belangrijke zaken niet meegenomen. Zoals:
- Er is voorbijgegaan aan de inherente onbetrouwbaarheid en willekeurigheid van FCD-gegevens. Om een gemiddelde van twee procent uitgeruste voertuigen te behalen, is het zeer waarschijnlijk dat er vele malen meer uitgeruste voertuigen moeten rondrijden. En dan nog zal het percentage sterk fluctueren.
- Het is niet waarschijnlijk dat een FCD-service een dergelijke hoge frequentie van gegevensuitwisseling heeft (elke 15 seconden). Verlaging van deze frequentie zal echter het globale beeld niet veranderen. Een combinatie van inductielus- en FCD-gegevens leidt tot een betrouwbaarder, nauwkeuriger en goedkoper systeem dan mogelijk is met een van de bronnen afzonderlijk.
- Er is vanuit gegaan dat inductielussen willekeurig falen, terwijl in de werkelijkheid een inductielus vaak faalt gedurende langere periode. Overigens heeft dit sterk te maken met de wijze waarop in de huidige monitoringspraktijk wordt omgegaan met onderhoud van de apparatuur en de snelheid waarmee (vaak eenvoudig te constateren) problemen worden opgelost.
- Het voorbeeld betrof een recht stuk snelweg met slechts één invoegstrook, waarop de intensiteit (de verkeersvraag) werd gemeten. De monitoringssystemen waarover wordt gesproken in bijvoorbeeld het Nationaal Data Warehouse-project moeten een complete verkeersnetwerk (zowel hoofdwegennet (HWN) als onderliggendwegennet (OWN)) afdekken. Dit betekent dat
- het model om gegevens te integreren (welke vorm dat ook heeft) in staat moet zijn om de verkeersafwikkeling op meerdere wegtypes te reconstrueren. De dynamiek van stedelijke netwerken is heel anders dan die op snelwegen.
- de hoeveelheid (te schatten) parameters in zo’n model sterk toeneemt met het aantal links en knopen, zeker als een gedeelte van het netwerk door verkeerslichten wordt geregeld;
- er veel meer onbekende grootheden zijn, waarvan een aantal uitsluitend kunnen worden afgeleid uit metingen (tenzij de FCD-dienst honderd procent dekking heeft). Dit betreft onder meer herkomst-bestemmingsmatrices of turnfracties en bijvoorbeeld de niet geobserveerde verkeersvraag bij op- en afritten.
Deze aspecten maken een objectieve evaluatie uiteraard veel ingewikkelder dan in de casus hierboven. Niettemin, de kosten die gemoeid zijn met het opzetten van een netwerkbreed monitoringssysteem maken het de moeite waard ook te kijken naar de baten.
Bronnen[]
Van Lint, Data fusie en toestand schatten, het maximale halen uit onbetrouwbare en heterogene verkeersgegevens, PAO Cursus Regionale verkeersmonitoring, TU Delft, 2006