Voor de monitoring van verkeer kunnen op verschillende manieren camera's worden ingezet. Met behulp van een videoalgoritme kunnen de beelden worden verwerkt en de voertuigen gedetecteerd. Behalve voor de inwinning van gegevens over de verkeerssituatie, worden ook camera's gebruikt voor incidentdetectie, doelgroepherkenning en kentekenherkenning. Het grote voordeel van camerasystemen is dan ook dat ze voor verschillende doeleinden geschikt zijn. Een nadeel is dat de beelden en het systeem gevoelig zijn voor zware weersomstandigheden en de nauwkeurigheid van de monitoring sterk wordt beïnvloed door kwaliteit van de beelden.
Werkingsprincipe[]
Onder de detectiecamera's behandeld in dit artikel worden de camera's bedoeld die het verkeersbeeld monitoren door middel van het detecteren en registreren van de passerende voertuigen. Naast deze vorm van camera's worden camera's binnen monitoring onder andere ook gebruikt voor:
- het monitoren van het verkeer door middel van het registreren van kentekens.
- het monitoren van het verkeer vanaf hoge gebouwen, vliegtuigen, helikopters etc, dit wordt remote sensing genoemd.
De detectiecamera's kunnen aan een mast naast de weg of aan portalen boven de weg worden bevestigd. Vanaf die plek brengt één camera een gedeelte van de weg in beeld. Eén of meer camera's worden aangesloten op een lokale verwerkingsunit, of de beelden worden via bijvoorbeeld een glasvezelverbinding naar een centrale verzonden en op een centrale verwerkingsunit aangesloten. De beelden uit de camera's worden met behulp van een videoalgoritme verwerkt om zodoende de voertuigen te detecteren.
Voor het verwerken van de camerabeelden worden twee soorten algoritmes toegepast:
- op basis van virtuele lussen (tripline),
- op basis van voertuigtracking.
Bij virtuele lussen worden in het camerabeeld lussen of vlakken getekend. Het videoalgoritme bepaalt of een voertuig zich in/op de virtuele lus bevindt. De actuele videobeelden binnen de virtuele lussen worden vergeleken met de statische achtergrond van het camerabeeld en met het camerabeeld dat korte tijd eerder is genomen. Als het actuele beeld binnen de virtuele lus verschilt met de statische achtergrond en het voorgaande beeld, dan is sprake van een detectie.
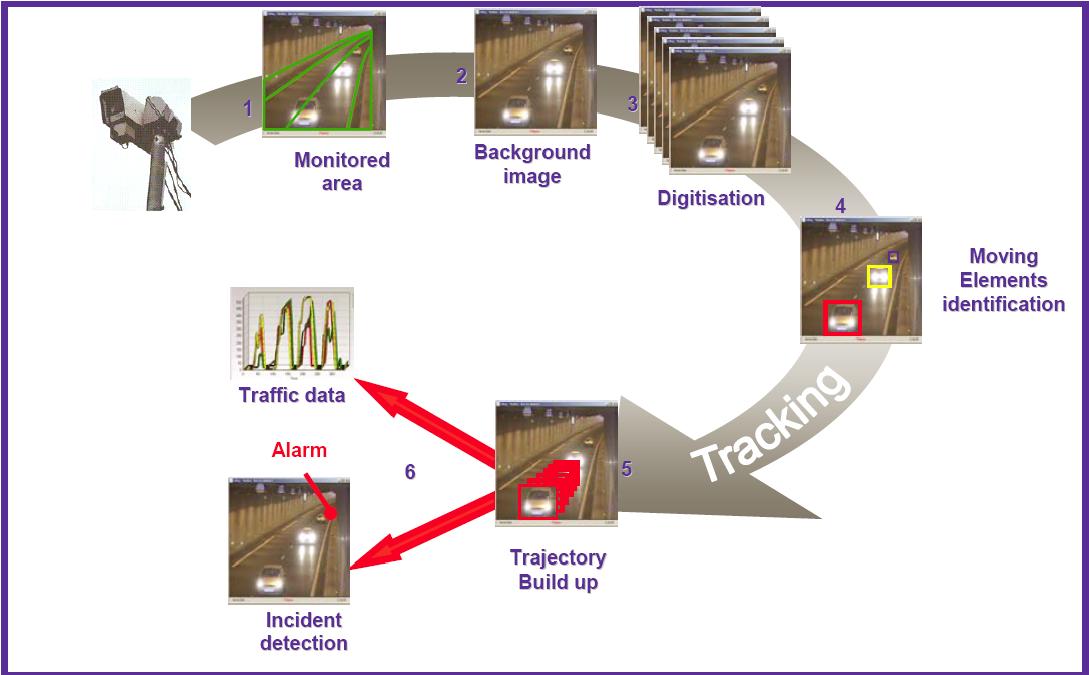
Bij voertuigtracking wordt een voertuig door het gehele camerabeeld gevolgd en wordt met behulp van een videoalgoritme een voertuigtrajectorie gemaakt. In onderstaande figuur is de verwerking van de camerabeelden tot verkeersgegevens weergegeven.
{kind=link}
- Het monitoringsgebied en de configuratie van het systeem worden opgesteld.
- Het systeem maakt een referentie beeld; dit beeld wordt regelmatig geüpdatet.
- De aanwezigheid van voertuigen wordt gedetecteerd door het camerabeeld te vergelijken met het volgende beeld en het referentiebeeld. Indien een verschil optreedt tussen deze beelden is er een voertuig aanwezig.
- Op basis van morfologische filters worden de voertuigen geïdentificeerd; elk voertuig wordt gemarkeerd.
- Het algoritme traceert de voertuigen (de vierkantjes/rechthoekjes) in de verschillende camerabeelden en analyseert de bewegingen om vervolgens een ruimte-tijd trajectorie te kunnen opstellen.
- Het voertuigtrackingsysteem produceert metingen van de individuele voertuigen, zoals de aanwezigheid en de snelheid. De individuele voertuigmetingen kunnen worden samengevoegd om een beeld te krijgen van de totale verkeersstroom. Daarnaast kan een alarm worden gegenereerd als een abnormale situatie ontstaat, bijvoorbeeld wanneer een voertuig stilstaat op een autosnelweg of in een tunnel.
Toepassing[]
Op zowel het Nederlandse hoofdwegennet als het onderliggende wegennet worden camera's gebruikt voor het detecteren van voertuigen en het monitoren van verkeersstromen. Bij het inwinnen van verkeersgegevens met behulp van camera’s kunnen de indicatoren intensiteit, snelheid, verkeerssamenstelling en filesituatie worden ingewonnen. De camera’s worden ook gebruikt voor:

- De camera’s en het incidentdetectiesysteem detecteren de stilstaande objecten (voertuigen). De objecten worden door het systeem herkend als een wijziging op een statische achtergrond. Bij de detectie van een stilstaand of langzaam rijdend voertuig geeft het detectiesysteem een geluidssignaal in de verkeerscentrale. Daarnaast wordt het detecteren van stilstaande voertuigen ook gebruikt op spitsstroken en in vluchthavens.
2. Beoordeling van de algehele verkeerssituatie
- In de verkeerscentrale worden de camerabeelden op een videowall geprojecteerd (zie afbeelding). Een operator houdt daarmee de verkeerssituatie in de gaten. Een door het incidentdetectiesysteem gesignaleerd incident wordt zo door de operator gecontroleerd. Vervolgens kan zo ook de oorzaak worden vastgesteld én worden beslist of verkeersmaatregelen nodig zijn. Met behulp van een aantal opeenvolgende camera's kan ook een spitsstrook worden geschouwd, voordat deze door de operator wordt vrijgegeven voor het verkeer.
3. Verkeerslichtenregelingen (VRI's)

- Per kruispuntarm worden een of meerdere camera’s boven of naast de weg geïnstalleerd om het verkeer ter hoogte van de VRI’s te monitoren. De camera’s zijn zodanig gericht, dat het gehele gebied waarbinnen objecten moeten worden gedetecteerd, binnen het camerabeeld vallen. Dit heet het detectiegebied. Binnen het detectiegebied worden een of meer virtuele detectielussen gedefinieerd. Meestal zijn dit een koplus en een wachtrijlus. Bij sommige cameradetectoren worden naast de virtuele lussen ook lijnen gedefinieerd. Met behulp van deze lijnen kan de passage van voertuigen worden geteld en kunnen wachtrijlengten worden gemeten. Het signaal dat de cameradetector afgeeft, kan door de verkeersregelinstallatie worden verwerkt tot gegevens voor de aansturing van de verkeerslichten. Daarnaast kunnen met de meeste cameradetectoren metingen aan het verkeersproces worden uitgevoerd, zoals de intensiteit, snelheid, wachtrijlengte, bezettingsgraad en gemiddelde wachttijd.
Bij het bepalen van de ligging en de afmeting van detectievelden, moet er rekening mee worden gehouden dat voertuigen op een naastgelegen rijstrook het detectieveld visueel kunnen afschermen. Dit kan de werking van de detector beïnvloeden. Een hoog voertuig kan bijvoorbeeld het detectieveld op een aangrenzende rijstrook aan het zicht van de camera onttrekken. Dit probleem kan worden voorkomen door de camera anders te positioneren of door meerdere camera's te plaatsen.
In algemene zin geldt dat met één camera op maximaal drie rijstroken kan worden gemeten. Bij het gebruik voor één rijstrook kan de camera het beste midden boven de rijstrook worden geplaatst, bij twee rijstroken boven de scheiding tussen de rijstroken en bij drie rijstroken boven de middelse rijstrook.
De cameradetectiesystemen worden over het algemeen als vaste systemen geleverd, maar er zijn ook tijdelijke, mobiele systemen leverbaar.
Kenmerken[]
Nauwkeurigheid[]
De kwaliteit van de gegevens wordt in hoge mate bepaald door de interpretatie en kwaliteit van de opgenomen beelden. Camera's zijn gevoelig voor een juiste belichting. Bij het analyseren van het camerabeeld treedt het probleem op dat de statische achtergrond aan veranderingen onderhevig is, bijvoorbeeld bij de overgang van dag naar nacht. Daarnaast is het beeld van een voertuig afhankelijk van de licht- en weersomstandigheden. Bij zonnig weer bijvoorbeeld omvat het beeld van een voertuig zowel het voertuig als zijn schaduw; bij donker weer wordt het beeld sterk bepaald door de verlichting in het voertuig. Ook andere weersomstandigheden zoals mist en zware regen kunnen het bereik en de kwaliteit van de camerabeelden beïnvloeden. Een goed cameradetectiesysteem bevat algoritmes die deze ongewenste effecten voor een belangrijk deel filteren. Voertuigtracking leidt tot een hogere nauwkeurigheid van de snelheidsmeting.
Bij de installatie van de camera's is het van belang dat deze niet op een windgevoelige constructie wordt geplaatst. Als dit niet het geval is, staan de beelden bij zeer harde wind niet helemaal stil. Daardoor 'bewegen' de virtuele lussen in het camerabeeld of blijken de camerabeelden bewogen. De tracking van de voertuigen is dan niet meer secuur genoeg.
In onderstaande tabel is een inschatting gegeven van de reëel te eisen nauwkeurigheid van de diverse meetgegevens, afkomstig uit het rapport van Polman.
| Nauwkeurigheid | |
|---|---|
| Intensiteit | 90-96% |
| Snelheid | 76-95%, 8 km/u |
Beschikbaarheid[]
In het rapport van Polman wordt gesteld dat het systeem ongeveer 99 procent van de tijd beschikbaar is.
Actualiteit[]
De videobeelden en de detectie van de voertuigen zijn in een fractie van een seconde beschikbaar in de locale verwerkingsunit. Afhankelijk van het type communicatiesysteem zijn de gegevens binnen een minuut tot enkele minuten beschikbaar voor gebruik in een centrale.
Flexibiliteit[]
Cameradetectie is snel aanpasbaar aan een nieuwe situatie. De camera's kunnen van afstand worden bediend. Ze kunnen voor verschillende doeleinden worden gebruikt, zoals detectie bij VRI's, incidentdetectie, doelgroepdetectie en waarneming van de actuele verkeerssituatie (langzaam rijdend verkeer/filevorming). Echter, voor het nauwkeurig meten van snelheid en intensiteit is een andere positie nodig dan voor het nauwkeurig detecteren van incidenten, stilstaande voertuigen, afgevallen lading et cetera.
Gegevenstype[]
Per rijstrook kunnen de volgende gegevens worden gemeten met de camera's en het videoalgoritme:
- intensiteit,
- snelheid,
- voertuigcategorie,
- bezettingsgraad,
- gemiddelde wachttijd (bij gebruik bij VRI’s).
Daarnaast kunnen de camera's worden gebruikt voor het detecteren van informatie zoals filelengte, doelgroepvoertuigen, stilstand, afgevallen lading. Met name voor incidentmanagement wordt de camera detectiemethode veel toegepast.
Realisatie[]
De doorlooptijd van de realisatie van een camerasysteem bedraagt ongeveer een maand tot enkele maanden. Dit is afhankelijk van zaken zoals de levertijd, de installatie/montage op de standplaats en het in werking stellen van het systeem. Het systeem kan ook als mobiel systeem worden uitgevoerd. In dat geval moet rekening worden gehouden met de voeding van het systeem, dat extra moet worden aangelegd.
Bij het installeren van de cameradetector moet de rijstrook alleen worden afgezet indien de cameradetector recht boven de rijbaan wordt bevestigd. Het verkeer wordt dus alleen in dit geval gehinderd.
Onderhoud[]
Het systeem moet regelmatig worden gecontroleerd op de juiste werking. Daarnaast moet de lens van de camera regelmatig schooon worden gemaakt voor een optimale beeld kwaliteit.
Het onderhoud, voornamelijk het reinigen van de lenzen, is arbeidsintensief en daardoor duur.
Kosten[]
De kosten van een videodetectiesysteem met liggen in de ordegrootte van 15.000 - 20.000 (Bron: Gemeente Rotterdam), afhankelijk van het aantal camera's die zijn aangesloten op het verwerkingssysteem.
Bronnen[]
Citilog, Mediatunnel, video detection system: for a better en safer tunnel management, Citilog, 2004
Folles, van der Burgt, Bokma, van Kaam, Ogen op de weg, resultaten en conclusies pilot video incident detectie A67, Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2001
Gemeente Rotterdam, Monitoring Rotterdam DP3: Vergelijking potentiële meetsystemen, Gemeente Rotterdam dS+V afdeling Verkeer en Vervoer, maart 2006
Hillen, Monitoring ten behoeve van reistijdinformatie, AGV in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2006
Polman, Voertuigdetectie: wensen en mogelijkheden, Goudappel Coffeng in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, november 2001
Wilson, Handboek verkeerslichtenregelingen, CROW, januari 2006
Openstaande vragen[]
- Wat zijn de exacte kosten voor een meetsysteem met detectiecamera's? Hoe zijn deze kosten opgebouwd?
Is heel moeilijk om daar een exact cijfer op te plakken. Hangt echt af van project tot project. Bijvoorbeeld, moeten extra palen worden geplaatst om de camera op te monteren of kan gebruik worden gemaakt van de bestaande infrastructuur en cameras. Naast de aankoop van de camera heb je ook nog de kost van de detectiemodule. Wat de onderhoudskost van het systeem betreft zit je met video detectie wel goed in tegenstelling bijvoorbeeld tot inductieve lussen. Je hooft geen grondboringen te doen en ook wegen moeten niet (zo vaak) worden afgezet om onderhoud te doen. Meer info over verkeersmonitoring dmv beeldverwerking kan je ook vinden op http://www.traficon.com
-> Terug naar weggebonden meetsystemen