Voertuiggebonden meetsystemen meten met gebruik van sensoren die in voertuigen aanwezig zijn. Via deze sensoren worden signalen uitgestuurd en opgevangen door een centrale computer, waardoor de verplaatsing van deze objecten kan worden gemonitord. De inwinning van gegevens met voertuiggebonden meetsystemen wordt ook wel Floating Car Data (FCD) genoemd. De belangrijkste sensoren voor FCD zijn GSM, GPS en DSRC. De nauwkeurigheid van het systeem is met name afhankelijk van de dichtheid van het wegennetwerk en het aantal voertuigen waarvan gegevens worden ingewonnen.
Inleiding[]
Bij voertuiggebonden systemen worden gegevens uitgewisseld tussen het voertuig en de wegkant/centrale. Het voertuig zendt de data, bijvoorbeeld over de actuele verkeerssituatie, naar een centrale locatie. Voertuiggebonden meetsystemen worden ook wel Floating Car Data (FCD) genoemd. Het is een verzamelnaam voor technieken waarbij voertuigen in het verkeer gegevens leveren over de verkeerssituatie. In beginsel levert FCD gegevens over reistijden in het verkeer, aangezien met regelmaat de positie van individuele voertuigen wordt vastgelegd. Een gegeven dat hieruit direct kan worden afgeleid, is de snelheid van het verkeer. Daarnaast geeft FCD inzicht in de herkomst-bestemmingspatronen.
Bij voertuiggebonden systemen kunnen verschillende sensoren gebruikt worden voor het meten van verkeersgegevens. De belangrijkste drie zijn:
Werkingsprincipe[]
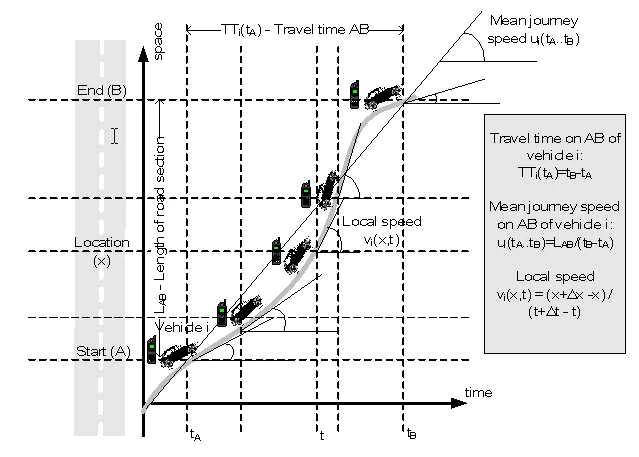
Floating Car Data-systemen meten met gebruik van sensoren die in voertuigen aanwezig zijn. De signalen van de sensoren worden opgevangen door een centrale computer, direct of via wegkantsystemen. Zo kan de verplaatsing van voertuigen worden gemonitord. In de centrale worden de gegevens bewerkt en geschikt gemaakt voor gebruik. Hiertoe vergelijkt de centrale computer de ontvangen positiegegevens met de posities op een digitale wegenkaart. Dit wordt map-matching genoemd. Het is op deze wijze mogelijk om vast te stellen welke trajecten de voertuigen in welke tijd hebben afgelegd. Door de gemeten reistijden te vergelijken met de toegestane snelheden op de wegvakken, kan bepaald worden of er vertraging of filevorming is. Het is mogelijk dat de voertuigen de map-matching aan boord uitvoeren in zogenaamde (navigatie)computers, en de (reistijd)gegevens over het gereden traject direct naar de centrale versturen.
Globaal worden de volgende stappen doorlopen bij verkeersmonitoring met Floating Car Data:
- Een sensor en soms tevens monitoringssyteem wordt in de voertuigen geplaatst. Dit kan een GSM zijn die vaak al aanwezig is, of een GPS die reeds aanwezig is in de navigatieapparatuur. Het kan ook speciaal ontworpen apparatuur zijn die met wegkantsystemen communiceert, zoals DSRC. De GPS-navigatieapparatuur zal aangepast moeten worden, zodat het systeem informatie naar de centrale stuurt. Bij GSM zal de apparatuur bij de telecomleverancier moeten worden aangepast, zodat de uitgezonden data kan worden opgeslagen voor monitoringsdoeleinden.
- De gegevens uit de voertuigen worden naar de centrale gezonden. Verschillende communicatiemethoden worden hiervoor gebruikt; de meest gebruikte vorm is via het GSM/GPRS netwerk.
- In de centrale worden de binnengekomen signalen uit de voertuigen verwerkt tot posities van de voertuigen. De binnengekomen signalen worden gefilterd. Indien het systeem gebruik maakt van mobiele telefoons, dan worden alle posities van de mobiele telefoons in het netwerk doorgegeven. De mobiele telefoons die zich niet in een wegvoertuig bevinden, worden uit de dataset gefilterd. Deze selectie van GSM-data gebeurt door patroonherkenning: het combineren van de positioneringsgebieden met het wegennet in de digitale kaart, statistische gegevens en andere wiskundige rekentechnieken.
- De gegevens worden vergeleken met een digitale kaart van het wegennet (map-matching). Voor elke gemeten positie wordt de meest waarschijnlijke positie op het digitale netwerk bepaald. Daarbij wordt gekeken naar de voorgaande posities en de structuur van het netwerk.
- De reistijden worden berekend met behulp van een algoritme.
- De verkregen informatie over de reistijden en de verkeersinformatie kan via providers en wegbeheerders aan de weggebruikers worden getoond. Verschillende manieren zijn hiervoor beschikbaar, zoals internet, radio, DRIP's en in de toekomst ook incar-systemen die de informatie (weer terug) ontvangen.
{kind=link}
Bron: van Lint
Toepassingen[]
In eerste instantie wordt FCD toegepast voor het verzamelen van trajectreistijden en trajectsnelheden. Met behulp van de metingen kan gedetailleerd inzicht worden verkregen in de snelheden en reistijden van individuele voertuigen. Op basis van de individuele snelheden en reistijden kan een verwachting worden gemaakt van de gemiddelde snelheid op een traject en de gemiddelde reistijd die hiermee samenhangt.
Naast de inwinning van reistijd- en snelheidsgegevens op een traject, kan FCD ook worden gebruikt voor het verkrijgen van inzicht in herkomsten en bestemmingen van het verkeer. Met FCD worden immers de werkelijk gereden routes waargenomen. Met behulp van deze routekeuzes kunnen de H/B-matrices beter worden opgebouwd dan met de informatie uit weggebonden meetsystemen en enquêtes. In verkeersmodellen worden de routekeuzes nu met behulp van algoritmes (zoals de kortste-route-toedeling) afgeleid op basis van de herkomst- en bestemmingsgegevens, maar niet op basis van werkelijk gereden routes. Met behulp van de gegevens uit de FCD kan hier beter inzicht in worden verkregen.
Het aantal voertuigen dat per tijdseenheid een bepaald punt passeert (intensiteit), kan met FCD-waarnemingen niet rechtstreeks worden gemeten. Wel kan een schatting worden gemaakt van de intensiteit als bekend is welk percentage van de voertuigen is uitgerust met een sensor om (verkeers)gegevens naar de centrale te sturen.
Nauwkeurigheid[]
De nauwkeurigheid van de FCD-informatie wordt bepaald door:
- De positiebepalings- en uitzendfrequentie.
- De nauwkeurigheid van de apparatuur/sensoren (GPS, GSM, DSRC).
- De nauwkeurigheid van de map-matching, dat onder meer afhankelijk is van de dichtheid van het wegennet. De nauwkeurigheid van het systeem is in stedelijk gebied minder groot dan daarbuiten. Dit komt onder meer doordat de positiebepaling op het onderliggend wegennet en stedelijk wegennet moeilijker is. Enerzijds komt dit door de grote dichtheid aan wegen. De wegennetwerk in de stad is namelijk veel fijnmaziger, waardoor in sommige gevallen niet (goed) is te onderscheiden welke route een voertuig heeft genomen. Anderzijds zorgt, met name bij GPS-systemen, de aanwezigheid van (hoge) gebouwen en bomen dat de map-matching lastiger is in een rurale omgeving. Het signaal tussen de ontvanger en de satellieten kan namelijk worden geblokkeerd, waardoor er tijdelijk geen of een minder nauwkeurige meting is.
- Het aantal voertuigen dat gegevens naar de centrale zendt. Wil de gewenste nauwkeurigheid worden bereikt, dan is het aantal voertuigen dat verkeersgegevens naar de verkeerscentrale moet sturen afhankelijk van de informatiebehoefte. Zo zijn voor bijvoorbeeld historische data minder voertuigen benodigd dan voor het verkrijgen van actuele verkeersinformatie. Onderzoek van Jochem, de Hoog en Zijderhand heeft aangetoond dat ongeveer twee procent van de voertuigen op een netwerk moet zijn uitgerust met een FCD-systeem om een goed inzicht te kunnen geven in de verkeerssituatie. Hierbij is aangenomen dat er naast het FCD-systeem geen weggebonden meetsystemen aanwezig zijn.
De nauwkeurigheid van FCD kan worden verbeterd door de gegevens uit de voertuigen te koppelen aan gegevens die met weggebonden meetsystemen worden ingewonnen. Door de gegevens uit verschillende systemen te integreren, datafusie, kan de nauwkeurigheid en de betrouwbaarheid van de informatie worden verbeterd. Met behulp van een voorbeeld dat via deze link is te bereiken, wordt inzicht gegeven in de combinatie van FCD met inductielussen.
Ontwikkelingen[]
FCD lijkt het potentieel te hebben om een relatief eenvoudige oplossing te bieden voor het verzamelen van verkeersgegevens op locaties:
- waar geen vaste meetsystemen aanwezig zijn,
- waar deze vaste systemen defect zijn,
- bij wegwerkzaamheden.
De komende jaren zal FCD sterke verbeteringen ondergaan. Die maken het systeem zowel technisch als economisch rendabeler en zorgen dat het systeem voor meerdere toepassingen van verkeersmonitoring toepasbaar is.
Het lastige bij de toepassing van voertuiggebonden meetsystemen is, dat een minimale hoeveelheid uitgeruste voertuigen nodig is om goede informatie uit FCD te halen. Zowel door de weggebruiker als door de leverancier van de informatie moet interesse zijn om in het systeem te investeren. Doordat de in-car units ook gebruikt kunnen worden voor andere toepassingen, zoals routenavigatie of kilometerbeprijzing/tolheffing, ontstaat een markt voor de systemen. De weggebruiker koopt de in-car systemen met een ander doel dan verkeersmonitoring. Maar tegelijkertijd kan de leverancier van verkeersinformatie de gegevens die de systemen uitzenden wel voor verkeermonitoring gebruiken. Vervolgens kan er een derde product ontstaan: het verzenden van (op maat) verkeersinformatie naar de individuele voertuigen. Om FCD-systemen zowel technisch als economisch rendabel te maken is een kritieke massa nodig. Door de groeiende populariteit van navigatiesystemen en de invoering van tolheffingssystemen zoals MAUT), is het mogelijk een voldoende groot percentage van het verkeer uit te rusten met een FCD-systeem.
Kosten[]
De kosten van Floating Car Data hebben betrekking op drie categorieën: in-car apparatuur/veranderingen bij de telecomprovider, communicatiekosten en kosten van de centrale.
In-car apparatuur die speciaal voor FCD wordt ontwikkeld is denkbaar. Maar waarschijnlijk zal FCD een extra functie zijn in al bestaande apparatuur zoals navigatiemiddelen.
Communicatiekosten (abonnementskosten en verbindingskosten) zijn op termijn waarschijnlijk de grootste kostenpost omdat zij continu terugkeren. Indien verkeersinformatie naar het voertuig terug wordt gezonden, kan een deel van deze kosten in rekening worden gebracht bij de weggebruiker.
Op de centrale zal software moeten worden geïnstalleerd (en ontwikkeld) voor onder meer map-matching en de berekening van de reistijden. Deze kosten zijn afhankelijk van het te bestrijken gebied, het aantal voertuigen dat data levert, de hoeveelheid gegevens die de voertuigen leveren en de aard van de informatie die uit de data naar voren moet komen.
Bronnen[]
Jochem, de Hoog, Zijderhand, Floating Car Data in the Netherlands, Ministerie van Verkeer en Waterstaat en DHV, 1998
Van Lint, Evaluatie en analyse van reisinformatie, Technische Universiteit Delft in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, maart-juni 2006
Van Lint, Data fusie en toestand schatten, het maximale halen uit onbetrouwbare en heterogene verkeersgegevenst, PAO Cursus Regionale verkeersmonitoring, TU Delft, 2006
Rutten, Schuurbiers en de Wolff, Floating car data per mobiele telefoon, Verkeerskunde 10, december 2003
Schoemakers, Stemerding en van der Vlist, Voertuigdetectie: wensen en mogelijkheden, Goudappel Coffeng in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, november 2001
van Toorenburg, Floating Car Data Communicatie Voertuig-wal, Ministerie van Verkeer en Waterstaat, Wegen naar de Toekomst, 1998
Openstaande vragen[]
Er zijn momenteel geen openstaande vragen. Aanvullingen zijn welkom.
Terug naar -> meetsystemen